【Node-RED入門-6】モノを検知した位置でKeiganMotorを停止する
← Part.5【Node-RED入門-5】フォトセンサーと連動してKeiganMotorを動かす→ Part.7【No
![]()
← Part.5【Node-RED入門-5】フォトセンサーと連動してKeiganMotorを動かす→ Part.7【No
← Part.4【Node-RED入門-4】物理ボタンでKeiganMotorを動かす → Part.6【Node-RE
← Part.3【Node-RED入門-3】2台のKeiganMotorを同時に動かす→ Part.5【Node-RED
← Part.2【Node-RED入門-2】ターンテーブルを回す→ Part.4【Node-RED入門-4】物理ボタンで
← Part.1【Node-RED入門-1】KeiganMotorを簡単に動かす → Part.3【Node-RED入門
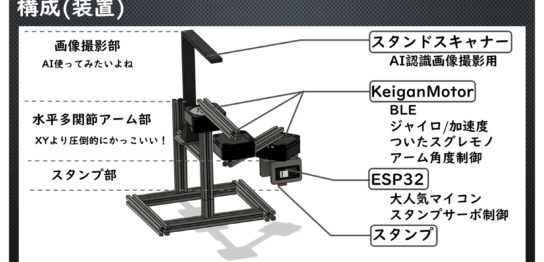
※本記事はユーザー様の事例紹介になります。 自動捺印ロボットアーム 通称「上司要らず」 働き方改革やワークライフバランス
2020年1月9日にリリースしたKeiganPiは、Raspberry Piに複数のKeiganMotor用開発環境がセ
Raspberry Pi3 にインストールしたNode-REDから Bluetooh Low Energy を介して K
イベント概要 2019年10月29日、「秋葉原UDX Next(4F)」にてPhysical Computing Wee