← Part.1【Node-RED入門-1】KeiganMotorを簡単に動かす
→ Part.3【Node-RED入門-3】2台のKeiganMotorを同時に動かす
■全記事一覧→Node-REDまとめ
もくじ
今回の内容
今回の内容は、KeiganMotorに アクリル製ターンテーブル を取り付けて以下の動作を設定します。
1.LEDの色や回転速度(rpm)を変更する。 2.時計回り・反時計回りに動かす。
アクリル製ターンテーブルの取り付け方法も以下に解説します。
アクリル製ターンテーブルを取り付ける
1. 固定板を取り外す ※KM-1Uのみ
六角レンチ(対辺サイズ2mm)を使用し、4ヶ所のネジを緩めて固定板を取り外してください。
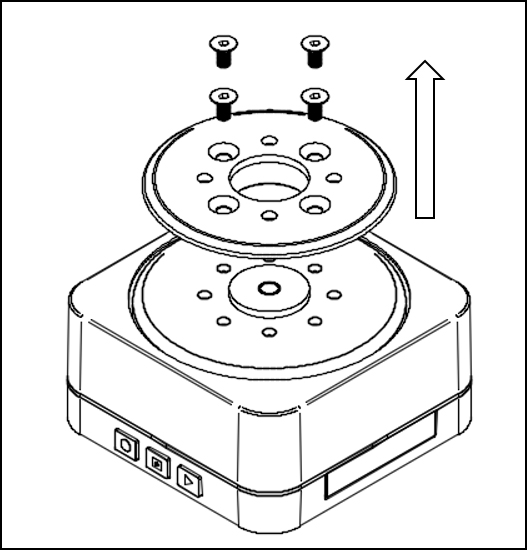
取り外した固定板とネジは大切に保管ください。
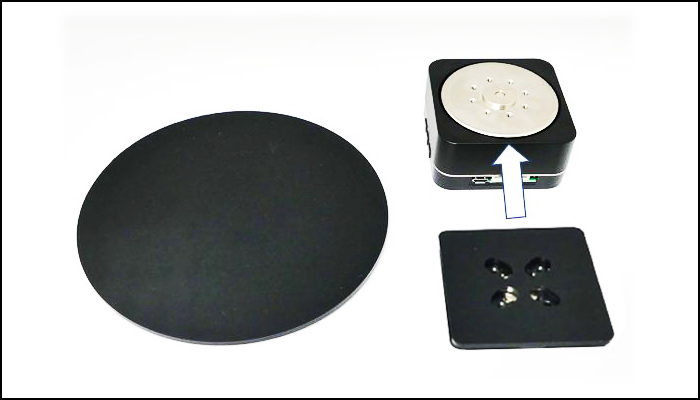
2. パーツを取り付ける
取り付けする機種により使用するパーツが異なります。
詳細は以下リンクを参照ください。
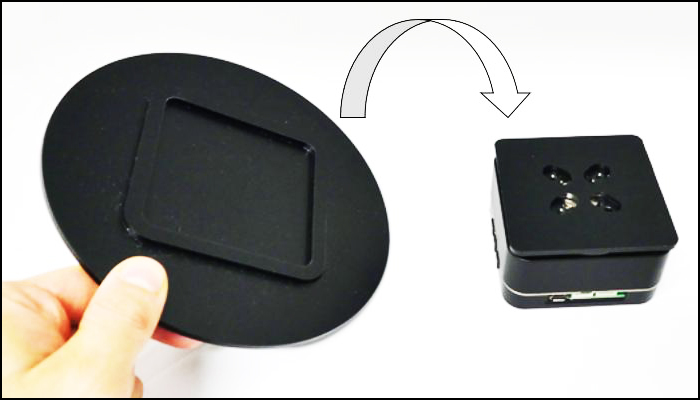
固定板を取り外したKM-1Uにアクリル製ターンテーブルを取り付けます。
パーツを写真のように取り付け、ターンテーブルにはめ込んでください。
※付属のM3×6のネジを使用
今回のノード設定
今回はノードで以下を設定します。
- ノードにコメントをつける
- ノードをコピーする
- LEDの色を変更する
- 回転速度を指定する
- 回転方向を指定する
- 回転時間を指定する
- 逆回転を設定する
- モーターを停止する
一見複雑に見えますが、1つ1つの指示は簡単です。
1. ノードにコメントをつける
ノードが増えてくると管理や情報共有が大変になります。
そのため、設定が完了した一連のフローに[comment]でコメントを残します。

1.[共通]メニューの[comment]をPart.1で設定したノードの左上に配置する。 2.配置した[comment]をダブルクリックしプロパティを開く。 3.名前を[KeiganMotorを動かす]に変更し[完了]をクリック。
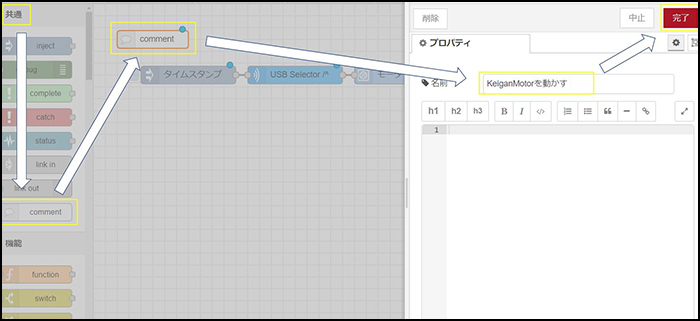
プロパティの下段には、備忘録やリンクも表記できます。
2. ノードをコピーする
パソコン上のファイルをコピーする方法と同様に、ノードもコピーが可能です。
以下手順で今回の作業用ノードをコピーしてください。
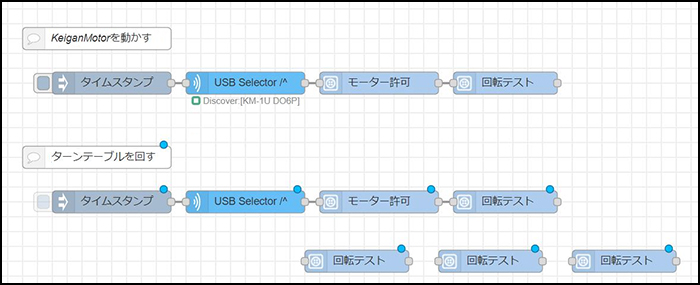
1.part.1で配置したノードと、先ほどのコメントをまとめて選択。 2.[ctrl]+[c]でコピー、[ctrl]+[v]で貼り付けする。 3.[回転テスト]のノードをコピーし、3回貼り付けして横に並べる。
コピーしたコメントは[002_ターンテーブルを回す]等に変更してください。
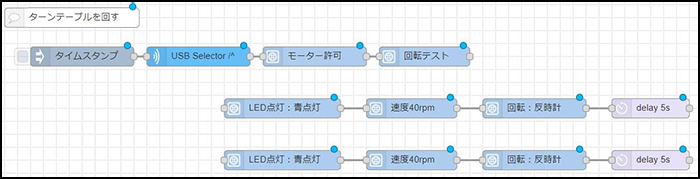
上記手順を終えると以下の配置になります。
3. LEDの色を変更する
新しくコピーしたノードを編集し、LEDの色を変更する指示を設定します。
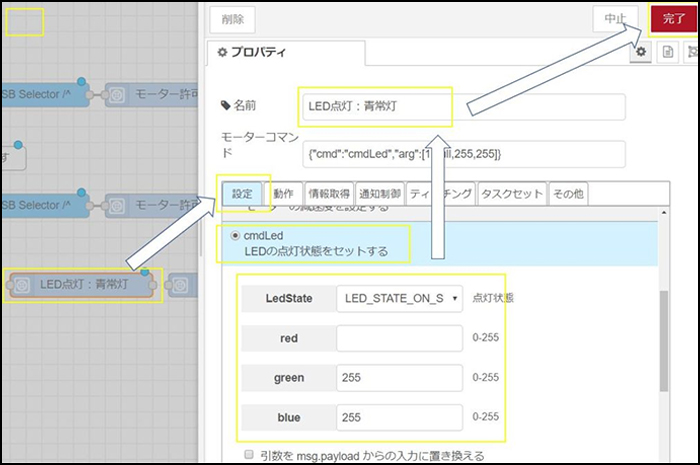
1.貼り付けした一番左のノードをダブルクリックしプロパティを開く。 2.[設定]タブから[cmdLed]を選択。 3.[LedState]のプルダウンから[LED_STATE_ON_SOLID]を選択。 4.[red:空白][green:255][blue:255]に設定。 5.名前を[LED点灯:青常灯]等にし[完了]をクリック。
備考
[LedState]の内容によって、以下の点灯方法になります。●LED_STATE_OFF (LEDが消える) ●LED_STATE_ON_SOLID (LEDが常に点灯) ●LED_STATE_ON_FLASH (点滅を繰り返す) ●LED_STATE_ON_DIM (フェードイン⇔フェードアウトを繰返す)[red][green][blue]は、RGB(赤・緑・青の割合)でLEDの色を指定します。
3種類全てを255に指定すると白色、3種類全てを0に指定すると黒色(不点灯)になります。
色の数値はペイントツール等でご確認ください。
4. 回転速度を指定する
モーターの回転速度を指定します。
Part.1の[cmdMoveByDistanceDeg]では角度・速度を同時に指定しましたが、今回は個別に指示を設定します。
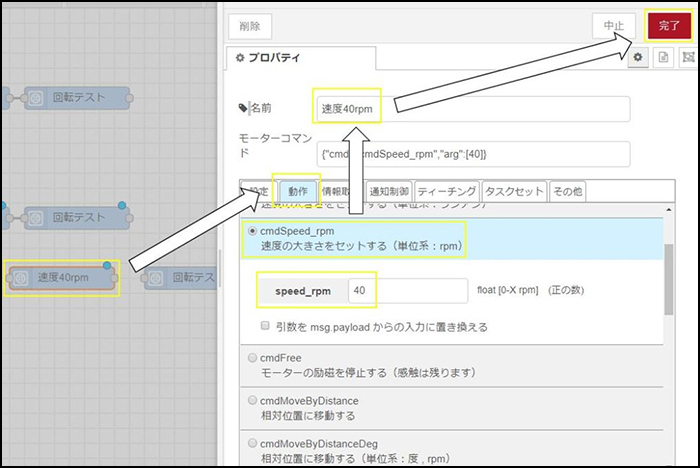
1.貼り付けした中央のノードをダブルクリックしプロパティを開く。 2.[動作]タブから[cmdSpeed_rpm]をクリック。 3.[Speed_rpm]を100に設定。 4.名前を[速度40rpm]等にし[完了]をクリック。
備考
rpmは[revolutions per minute]の略で、1分間の回転数を表します。
(100の場合、1分間に100回転する速度)
同じ[cmdSpeed]にはラジアンも存在します。
こちらは国際単位系 (SI)の単位で、1ラジアン=約57.29578° となります。
rpmとラジアンの数値を誤って入力すると回転速度や距離が大きく変わるのでご注意ください。
5. 回転方向を指定する
KeiganMotorの回転方向を指定します。
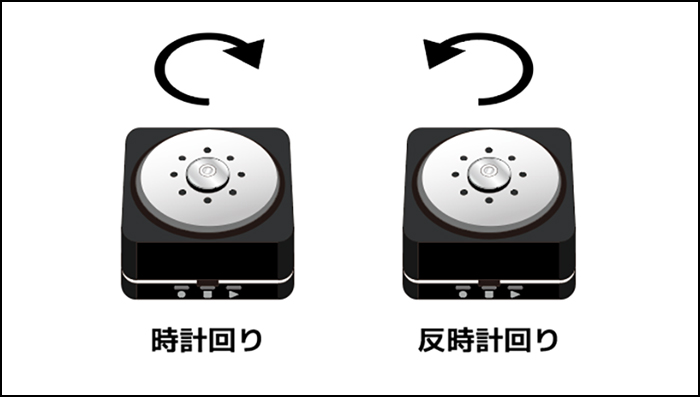
時計回り(右回転)または反時計回り(左回転)を指定できます。
※まず反時計回りを指定します。
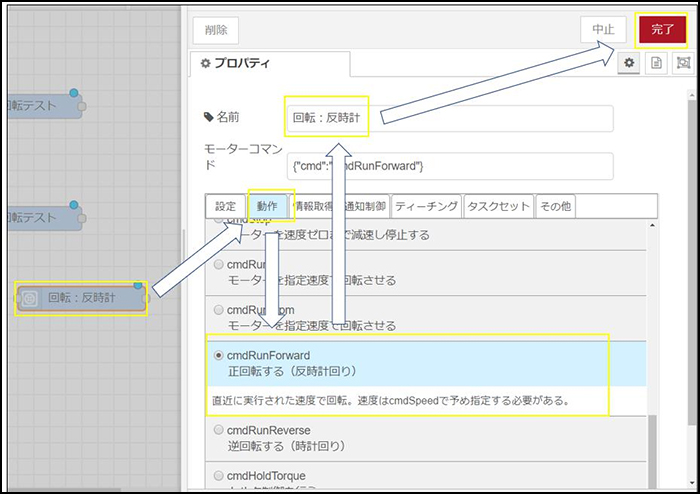
1.貼り付けした右側のノードをダブルクリックしプロパティを開く。 2.下段タブの[動作]にある[cmdRunForward]をクリック。 3.名前を[回転:反時計]にし[完了]をクリック。
6. 回転時間を指定する
[cmdRunForward]は、次の指示が実行されるまで回転し続けます。そのため、この回転の指示をしばらく続ける(次の指示が実行されないよう)設定する必要があります。
[機能]メニューから[delay]を[回転:反時計]の次に配置してください。
配置した段階で自動的に[delay 5s]と表示されますが、これは「次のノードを実行するまで5秒間待機する」という設定になります。
この指示を与えないと次のノードが即実行され、意図した動きにならない場合があります。
配置後、[LED点灯:青常灯]~[delay 5s]の4つのノードを左から順番に接続してください。
7. 逆回転を設定する
今度は逆方向(時計回り)の指示を設定します。
上記で接続した4つのノードをコピーし、そのまま下に貼り付けてください。
コピーした下段のノードを以下に変更してください。
[LED点灯:青常灯]
1.[red:255][green:空白][blue:255]に設定。 2.名前を[LED点灯:黄常灯]に変更し[完了]をクリック。
[回転:反時計]
1.[動作]タブから[cmdRunReverce]に変更。 2.名前を[回転:時計]に変更し[完了]をクリック。
※[速度40rpm][delay 5s]は変更しません。
8. モーターを停止させる
最後に、LED点滅とモーター停止の動作を設定します。
[LED点灯:青常灯]と[速度100rpm]のノードを使用しますので、この2つのノードをコピーして下に貼り付けしてください。
また、残っている[回転テスト]のノードは使用しないので[backspace]キーを押して削除してください。
配置した2つのノードを、それぞれ以下に変更してください。
[LED点灯:青常灯]
1.[red:40][green:40][blue:40]に設定。 2.名前を[LED点灯:白点滅]に変更し[完了]をクリック。
[速度40rpm]
1.[動作]→[cmdStop]を選択。 2.名前を[モーター停止]に変更し[完了]をクリック。
以上で今回の設定が全て完了しました。
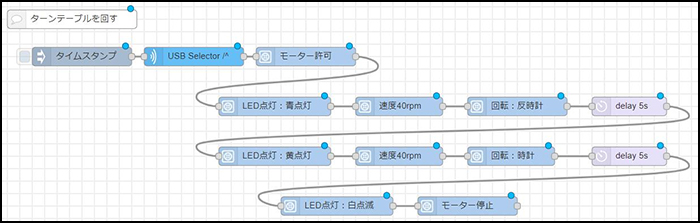
下記のようにノードを接続し、デプロイしてください。
KeiganMotorを動かす
以上で準備が完了したので、実際にKeiganMotorを動かします。
タイムスタンプをクリックし、KeiganMotorが以下のように動けば成功です。
1. 今回使用したノード
今回のブログで使用したノードは以下から読み込みが可能です。
文字列を全て選択(3回クリック)し[ctrl]+[c]でコピーしてください。
2. ノードの読込み方法
以下動画を参照し、右上[三]メニューから[読み込み]を選択し、コピーした文字列を貼り付けし[読み込み]をクリックしてください。
次回予告
次回は1つのKeiganPiで2つのKeiganMotorを動かします。
次回も是非ご覧ください。
> Part.3【Node-RED入門-3】2台のKeiganMotorを同時に動かす

※KeiganPiとは、Raspberry Pi(ラズパイ)にKeiganMotorの開発環境をインストールした製品です。
