← Part.2【Node-RED入門-2】ターンテーブルを回す
→ Part.4【Node-RED入門-4】物理ボタンでKeiganMotorを動かす
■全記事一覧→Node-REDまとめ
もくじ
今回の内容
今回は2台のKeiganMotorをKeiganPiに接続し、その後指定した時間(12:00)に自動で回転する動きを設定します。
主な設定は以下の通りです。
1.2台目のKeiganMotorを接続する。 2.2台のKeiganMotorに動きを設定する。 3.指定時間にKeiganMotorを自動で回転させる。
2台目のKeiganMotorをスキャンする
1. 2台目のKeiganMotorを接続する
2台目のKeiganMotor KM-1Uを接続します。
接続方法は【こちら】を参照ください。

接続後、Node-REDへログインしてください。
※動作を分かりやすくお伝えするため、アクリル製ターンテーブル(マットホワイト)を取り付けています。
2. Node-REDを設定する
今回は1つのノードから2つのノードを同時に実行する設定をします。
[Part.2 Node-REDでターンテーブルを回す]で使用したノードを使用しますので、Part.2の作業を行っていない場合は【こちら】からノードを読み込んでください。
今回の設定は以下の通りです。
1.[タイムスタンプ]を1ヶ所に配置し、[USB Selector]を2ヶ所に配置する。 2.[タイムスタンプ]から2ヶ所の[USB Selector]にそれぞれノードを接続する。 3.[USB Selector]でそれぞれ別のKeiganMotorを設定する。
※[USB Selector]のプロパティで、命令を送りたいKeiganMotorをプルダウンから選択してください。
Auto Selectで選択した場合、正常に動作しない可能性があります。
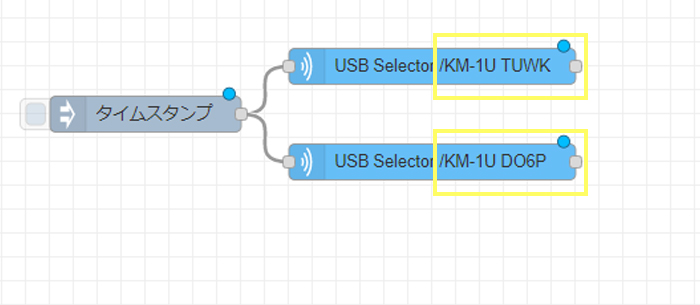
これで2つのKeiganMotorへ個別に指示を設定できるようになりました。
2台のKeiganMotorに動きを設定する
続いて、Part.2で使用した設定をコピーし一部を変更します。
- [モーター許可]~[モーター停止]までのノードをコピーする。
- コピーしたノードを貼り付け、それぞれ[USB Selector]と接続する。
- 貼り付けしたノードの[回転:反時計][回転:時計]を入れ替えて接続する。
ノードを入れ替える場合、まずノード同士を接続している線を選択し、キーボードのbackspaceキーを押して削除します。
その後、ノードを入れ替えて再接続することで簡単に指示を変更できます。
このように手軽に動作変更できる点もNode-REDの魅力の1つです。
この設定で2台のKeiganMotorに異なる回転方法を設定できました。
指定時間にKeiganMotorを回転させる
1. タイムスタンプを設定する
[タイムスタンプ]のプロパティを設定し、特定の時間に自動でフローを実行させます。1.[タイムスタンプ]のプロパティを開く。 2.繰り返しのプルダウンから指定した日時を選択。 3.任意の曜日・時間を設定し完了をクリック。
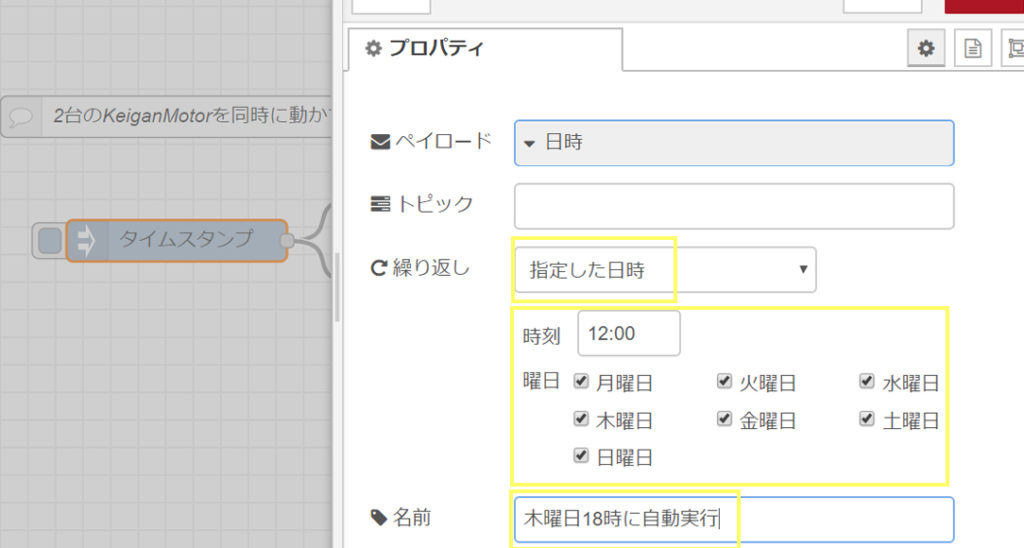
自動実行を指示する場合、名前にその詳細を記載しておくと便利です。
※自動実行処理は、KeiganMotorが正常に接続されているとNode-RED画面を開いていない場合でも処理が実行されます。
複数の自動実行を設定する場合はご注意ください。
2.コメントを編集する
[comment]タブを[タイムスタンプ]左上に配置し、2台のKeiganMotorを同時に動かすに変更します。これで設定が完了しましたので、忘れずデプロイを行ってください。

KeiganMotorを動かす
今回は時間を設定しましたので、その時間に自動でKeiganMotorが回転することを確認してください。
※時間設定している場合でも[タイムスタンプ]をクリックすることで設定に関係なくフローを実行できます。
1. 今回使用したノード
今回のブログで使用したノードは以下から読み込みが可能です。
文字列を全て選択(3回クリック)し[ctrl]+[c]でコピーしてください。
※[タイムスタンプ]の時間設定はしていません。
ノードの読込み方法については「こちら」を参照ください。
今回の事例の活用方法
1.アラーム時計の代わりとして
日時と時間を指定できるため、弊社では12時のランチタイムと同時にKeiganMotorが回転するように設定しました。
視覚的に非常に分かりやすく、回転方法も自由にカスタマイズできるため見ていて面白い作品になっています。
2.作業の自動化として
定時になると自動でビニールハウスの巻き上げを行う…等の人が行うルーチン作業の自動化としてもお役立ていただけます。
※KeiganMotorは防水対応していませんので、野外で使用する場合は防塵・防水等の対策が必要です。
3.自動運搬ロボットとして
本製品にロボットスターターキットを組み合わせることで、定時になると自動で動くロボットも製作可能です。
色々なアイデアを形にし、ロボットが身近にある生活を楽しんでください。

KM-1U ロボットスターターキット
KeiganMotor モーターモジュール®
カメラプラットホームキットとドリーキットのパーツが全て揃っているお得なキット。
ロボットの試作・実験に最適な道具一式が揃っています。
次回予告
次回はKeiganPi付属の物理ボタンを使用し、物理ボタンでKeiganMotorを動作します。
是非次回もご覧ください。
> Part.4【Node-RED入門-4】物理ボタンでKeiganMotorを動かす

※KeiganPiとは、Raspberry Pi(ラズパイ)にKeiganMotorの開発環境をインストールした製品です。
