← Part.4【Node-RED入門-4】物理ボタンでKeiganMotorを動かす
→ Part.6【Node-RED入門-6】モノを検知した位置でKeiganMotorを停止する
■全記事一覧→Node-REDまとめ
もくじ
今回の内容
今回は市販のフォトセンサーを使用し、フォトセンサーの前にモノが通ればKeiganMotorが動くよう設定します。
また、フローも増えてきたので全てのフローとタブのバックアップをとる方法やフローの誤作動対策の方法も一緒に解説します。
※タブについては【こちら】を参照ください。
1.全てのフローとタブのバックアップをとる 2.フローの誤作動対策をする 3.フォトセンサーを準備する 4.フォトセンサーを取り付ける 5.フォトセンサーを設定する 6.実際にKeiganMotorを動かす
全てのフローとタブのバックアップをとる
今まで作成したフローとタブは、全てKeiganPi内のSDカードに保存されています。
SDカードが損傷すると今までのデータも消失する恐れがあるため、全てのフローとタブのバックアップを取っておきます。
1.右上[三]メニューから書き出しを選択。 2.最上段列から全てのタブを選択。 3.最下段のダウンロードを選択。
この作業でflows.jsonというファイルがダウンロードされます。
メモ帳などのテキスト編集ソフトで開くと文字列が表示されますので、この文字列をコピーして読み込むことで、作業環境を復元できます。
※読込み方法は【こちら】を参照ください。
フローの誤作動対策をする
Part.3【Node-RED初級-3】2台のKeiganMotorを同時に動かすで設定した[タイムスタンプ]ノードを忘れていると、指定時間にKeiganMotorが回転して怪我をする恐れがあります。
また、複数のフローが機能している状態では同じ条件で複数のノードが実行される可能性もあります。
これらを防止するため、今作業をしているタブ以外を無効にする方法を解説します。
タブを無効にする
タブをダブルクリックし、最下段の有効をクリックし無効へ変更してください。
(タブ全体が半透明になります)
タブの無効はデプロイするまで反映されませんので、忘れずデプロイしてください。
タブを無効にしても、そのタブのノードの配置やコピーは問題なく行えますので上手くご活用ください。
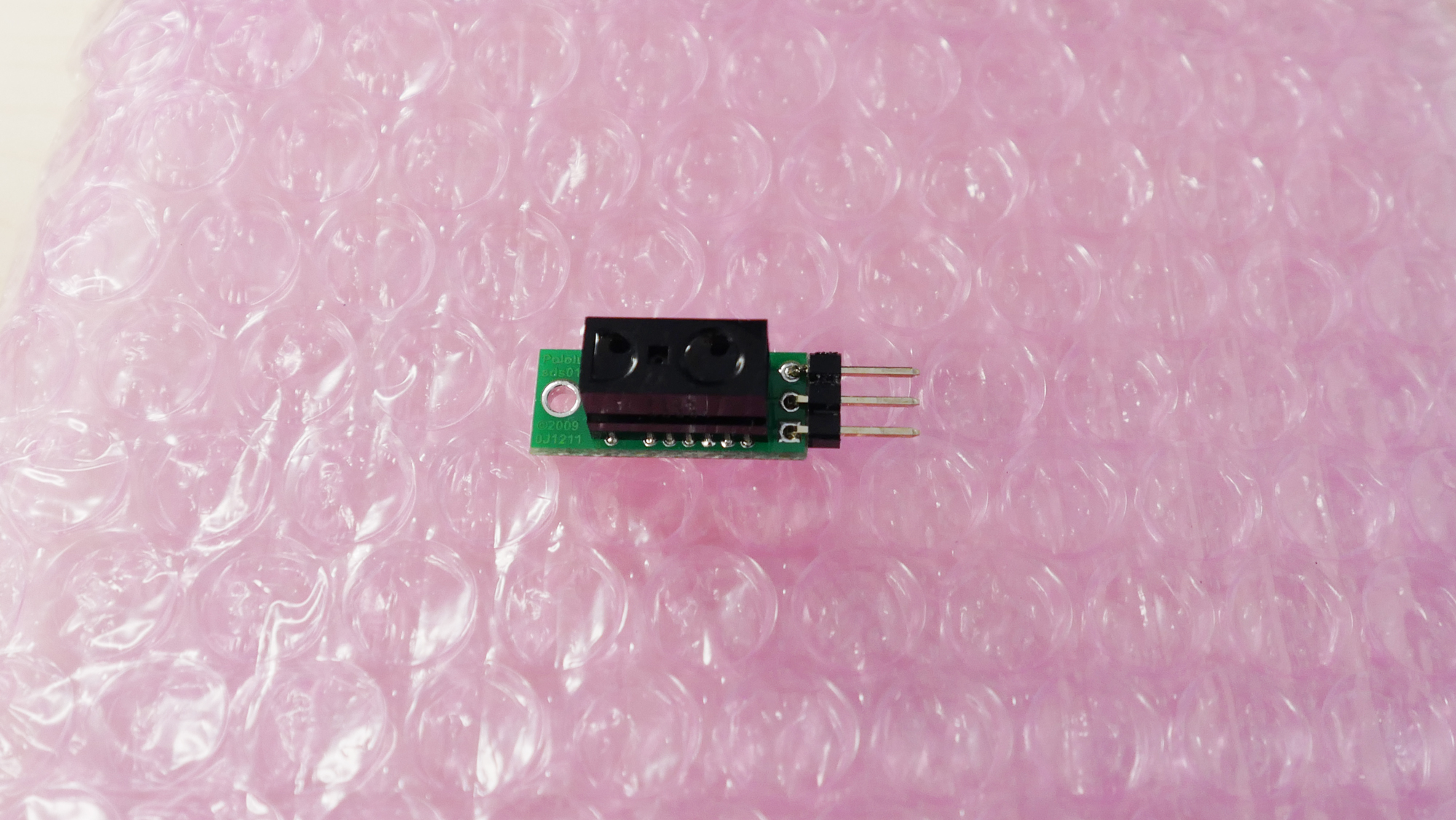
フォトセンサーを準備する
今回使用するフォトセンサー
Pololu製 GP2Y0D805Z0F搭載2値出力距離センサ(5cm)
※SWITCH SCIENCE様販売ページへ
フォトセンサー以外で使用する部品
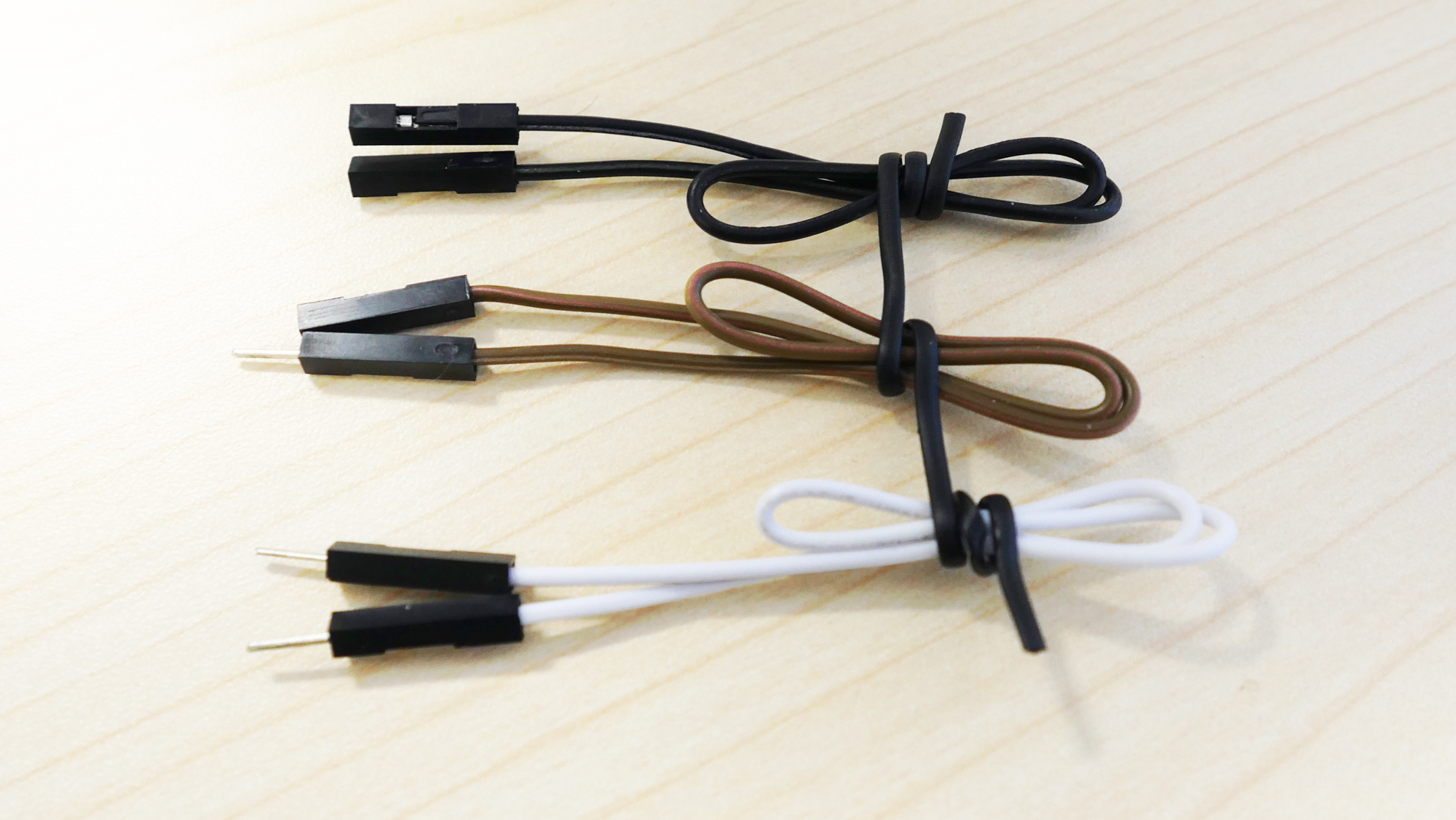
フォトセンサーをKeiganPiやブレッドボードに接続する部品。
3種類のタイプ(上から順にメス⇔メス・メス⇔オス・オス⇔オス)があり、部品のリード線を延長したり、オス⇔メスを変換することもできます。
フォトセンサーを取り付ける
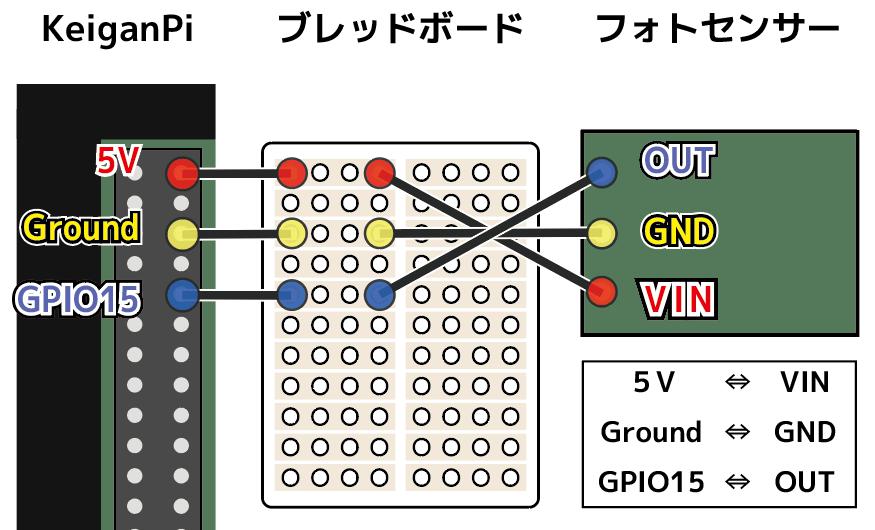
実際にフォトセンサーを取り付けます。
手順はPart.4内で物理ボタンを取付けした方法と同様、KeiganPiのGPIOピンを使用します。
上記図を参照してフォトセンサーを取り付けてください。
※ブレッドボードを経由せず直接KeiganPiとフォトセンサーを接続しても問題ありません。
フォトセンサーを設定する
今回使用するフォトセンサーは、モノがフォトセンサーの範囲に存在すると0(Low)、存在しないと1(High)の情報を出力します。
この情報をKeiganPi側で受信し、モノが存在する時(0の情報を出力した時)にKeiganMotorを動かす設定にします。
フォトセンサーの情報を確認する
今回はPart.4【Node-RED初級-4】物理ボタンでKeiganMotorを動かすで使用したノードを編集します。
※必要に応じて[ctrl]+[c]でコピーし貼り付けしてください。
緑ボタンの指示である[PIN:↑37]ノードを編集し、10-GPIO15-RxDに変更後完了をクリック、その後忘れずデプロイしてください。
今回の作業はこれで完了ですが、使用するフォトセンサーによっては0または1の情報が逆になっている場合があります。
その場合はSwitch機能の[ONで実行]ノードの条件を逆に変更してください。
※Switch機能の詳細は【こちら】
実際にKeiganMotorを動かす
センサーに物体を置き、センサーの反応と同時にKeiganMotorが回転することを確認してください。
使用事例
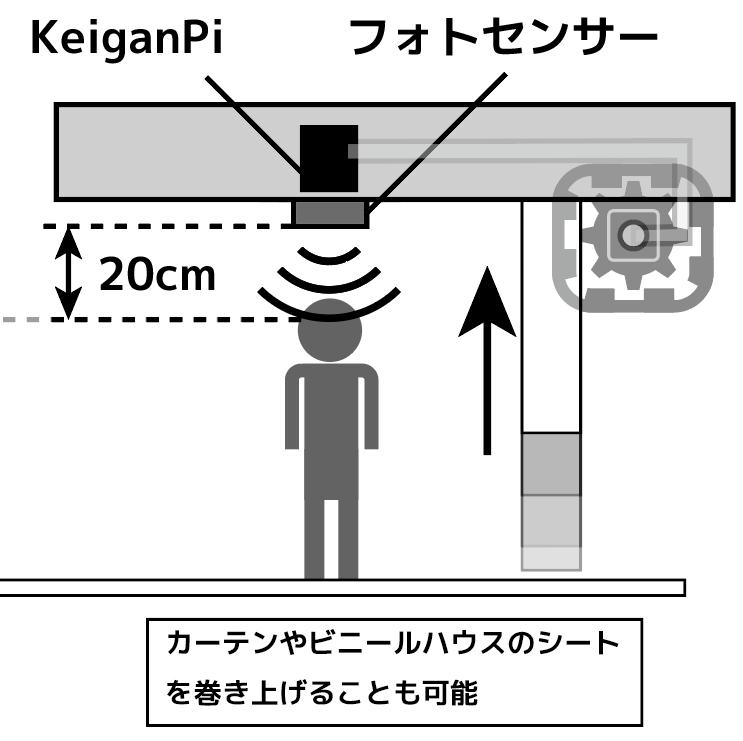
フォトセンサーは様々な種類があり、感知する距離も製品によって異なります。
例えば以下図のようにフォトサンサーを天井に設置し、フォトセンサーから20cm以内の範囲に人が通りかかると、カーテンやビニールハウスのシートを巻き上げるといった自動化も簡単に行えます。
また、現在新商品として以下リニアアクチュエーターの販売を準備中です。
ご入用でしたら、お気軽にお問合せよりご連絡ください。
今回使用したノード
今回のブログで使用したノードは以下から読み込みが可能です。
文字列を全て選択(3回クリック)し[ctrl]+[c]でコピーしてください。
ノードの読込み方法は【こちら】
次回予告
次回は引き続きフォトセンサーを使用します。
今度はKeiganMotorにフォトセンサーを取り付けて回転させ、モノを検知すればその場所で静止する動きを設定します。
次回も是非ご覧ください。
→ Part.6【Node-RED入門-6】モノを検知した位置でKeiganMotorを停止する

※KeiganPiとは、Raspberry Pi(ラズパイ)にKeiganMotorの開発環境をインストールした製品です。
