←【Node-RED入門-14】動作とカメラの撮影を指定回数繰り返す
■全記事一覧→Node-REDまとめ
もくじ
今回の内容
今回は sequencerノード の cmdCurveType を設定し、KeiganMotorの加速度(動き出す時の速度)と減速度(止まる時の速度)を変更して動きの違いを確認します。
※加速度はラジアン毎秒毎秒[rad/s2]で1~200の数値を設定可
過去ブログでは設定値を180にし素早く動かしていました。
素早く動かすメリットとして、緊急停止ボタンのような素早く動作させる必要があるモノ等に活用できます。
逆に設定値を10程度にすると上記右図の通り滑らかに動かすことができます。
滑らかに動かすメリットとして、人が身近で使用し急に動くと危ないモノや、製品にデリケートな部品や重い部品があることで急に動くと製品自体に負荷がかかるモノ等に活用できます。
カメラプラットフォームとしては、動画撮影時に滑らかに動かすことでキレイな映像を撮れるため設定値の低い方が推奨されます。
以上を踏まえ、今回のブログは以下の順で解説していきます。
1.加減速曲線を設定する 2.加速度・減速度を設定する 3.設定した情報を保存・リセットする 4.実際にKeiganMotorを動かす
前回までの ノード を使用しますので、【こちら】から ノード を読み込んでください。
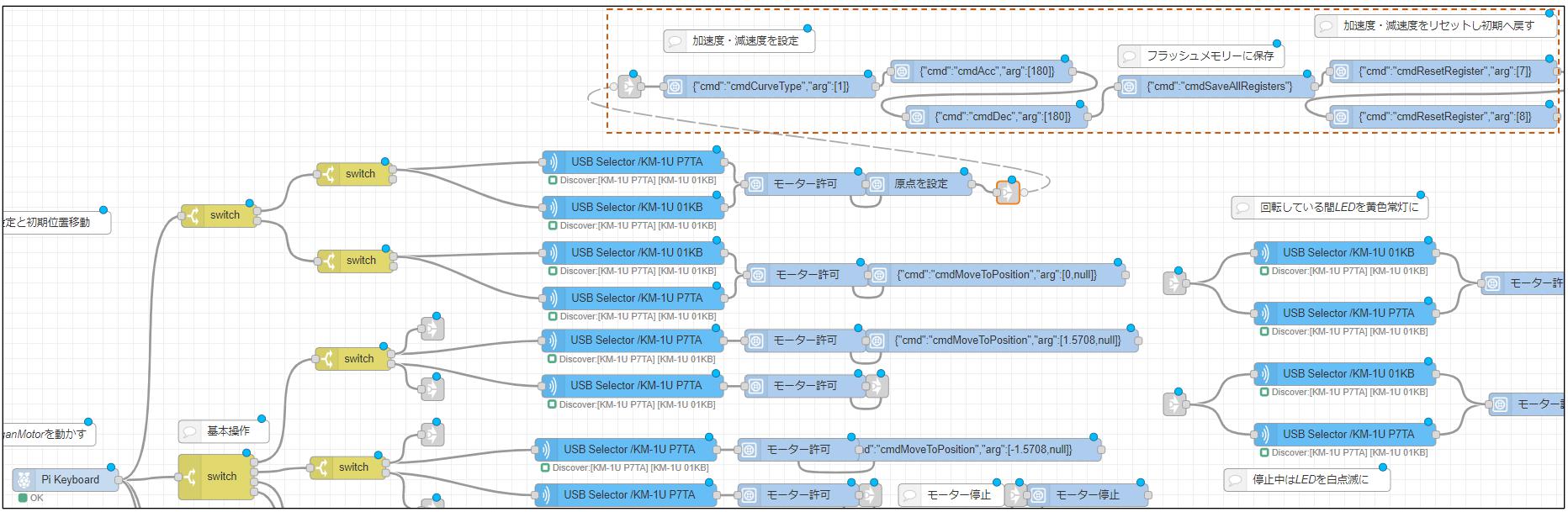
今回は「現在位置を原点に設定する機能」の フロー に ノード を追加していきます。
加減速曲線を設定する
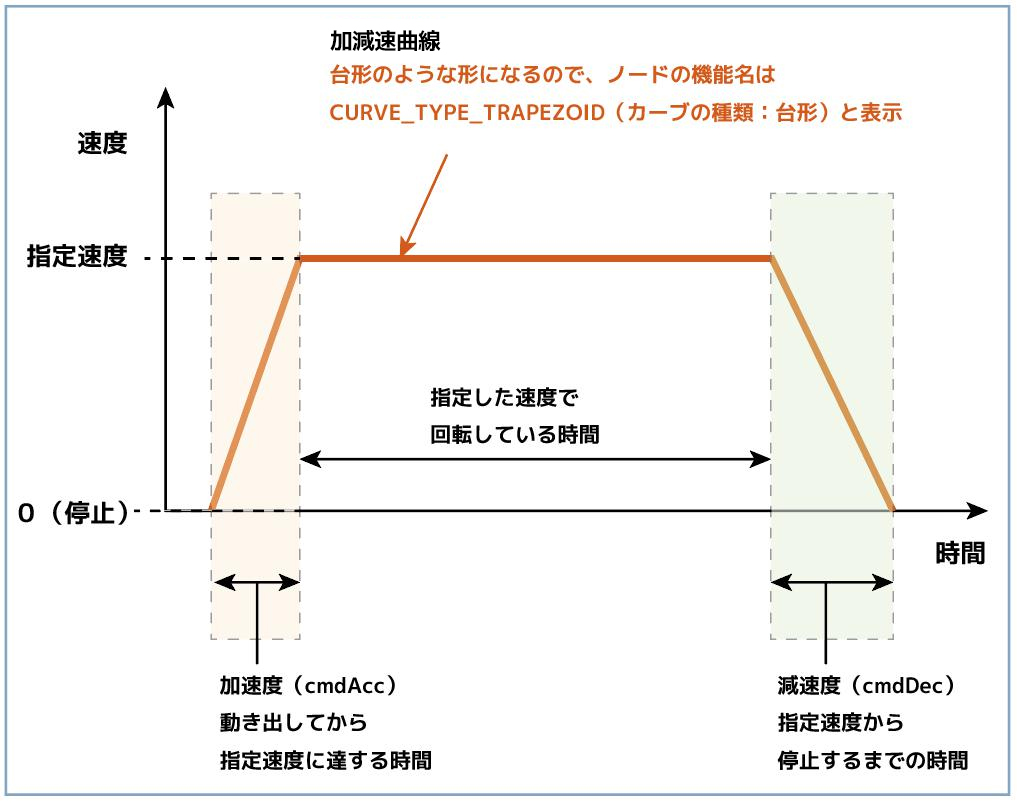
加減速曲線とは、加速度~減速度までの流れを繋げた以下のような線のことをいいます。
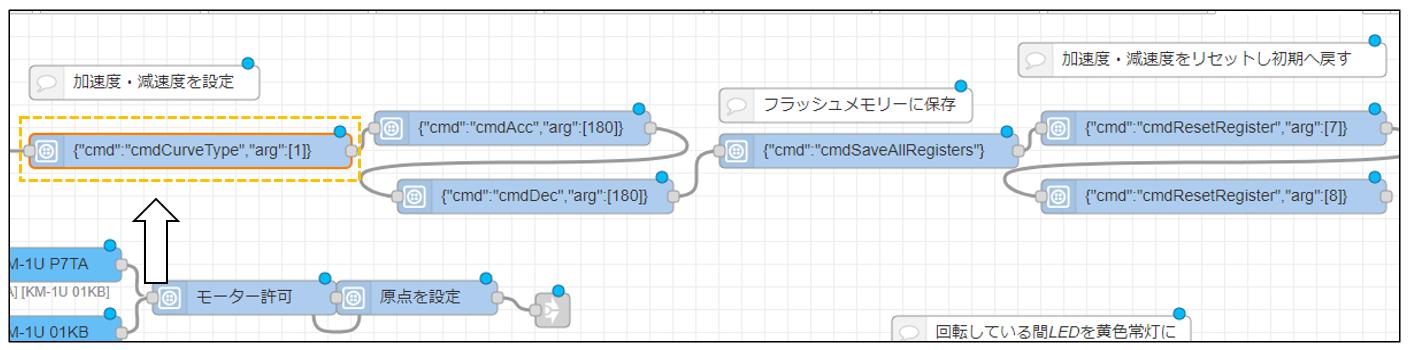
sequencerノード の cmdCurveType でこの加減速曲線のタイプを設定できます。
後述する加速度( cmdAcc )と減速度( cmdDec )を有効にするには、まず CURVE_TYPE_TRAPEZOID を選択します。
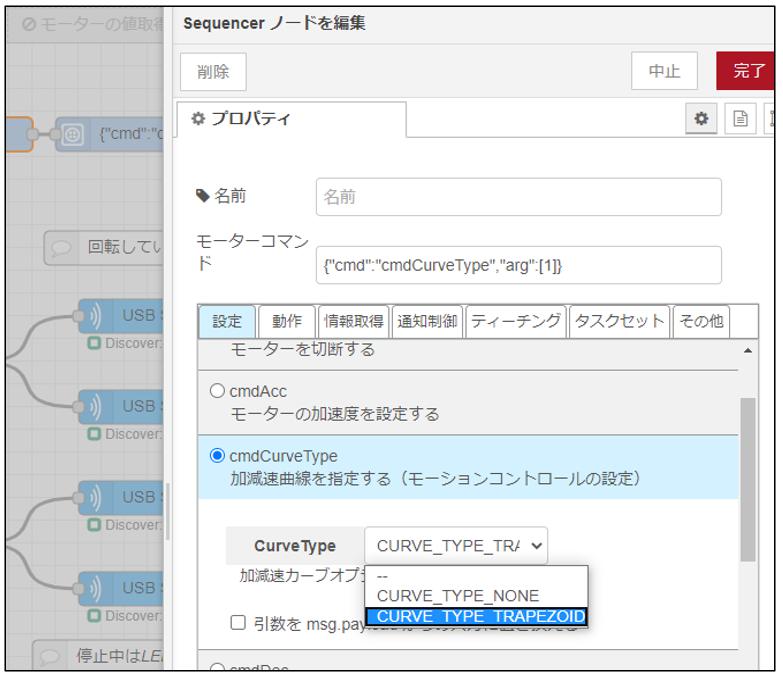
【設定一覧】 ーーーー :(未設定:使用不可) CURVE_TYPE_NONE :無効(設定変更が無効になる) CURVE_TYPE_TRAPEZOID:有効(設定変更が有効になる)
加速度・減速度を設定する
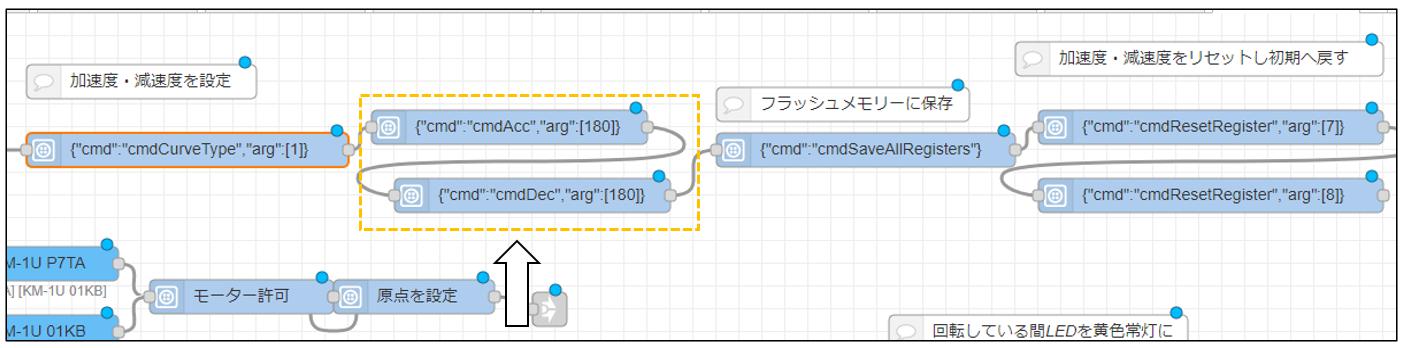
cmdCurveType で CURVE_TYPE_TRAPEZOID を有効にすると、加速度(cmdAcc)と減速度(cmdDec)が有効になります。
※変更自体は curveTYpe = NONE でも可能
加速度(cmdAcc)を設定する
KeiganMotorが指定した速度に到達するまでの加速度を設定します。
※0は設定しないでください

今回は180を設定します。
減速度(cmdDec)を設定する
KeiganMotorが現在の速度から停止するまでの減速度を設定します。
※0は設定しないでください
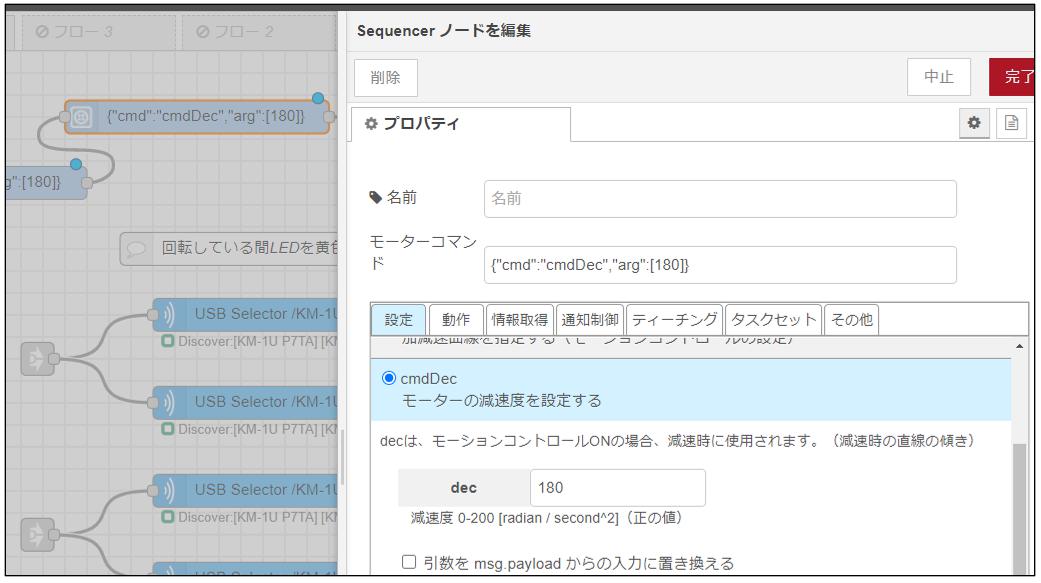
加速度の時と同じく180を設定します。
設定した情報を保存・リセットする
続いて、設定した加速度・減速度をKeiganMotor内蔵フラッシュメモリーに保存(またはリセット)する方法を解説します。
設定した情報を保存する
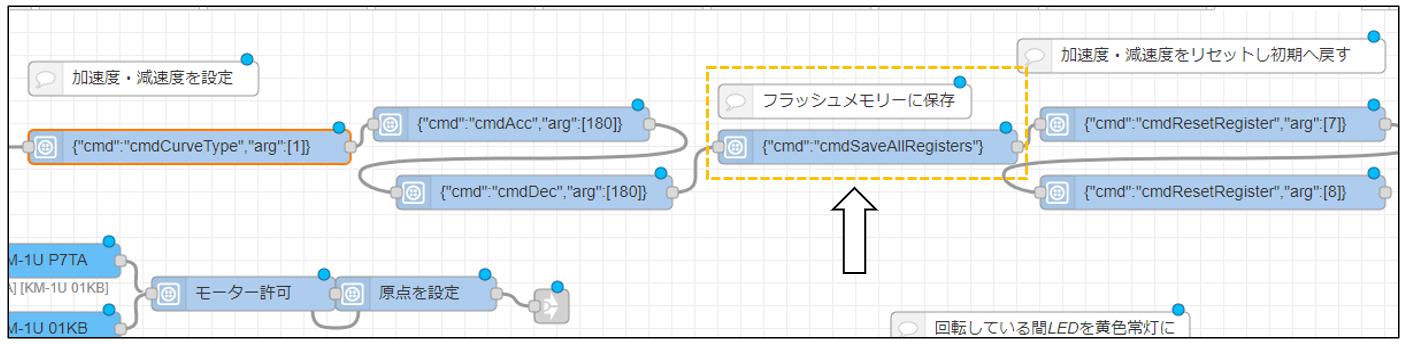
cmdSaveAllRegisters は保存可能な情報すべてをKeiganMotor内蔵フラッシュメモリーに保存します。
(KeiganMotorの電源を切っても情報が保持されます。絶対位置は安全の都合上保存されません)
設定した情報をリセットする
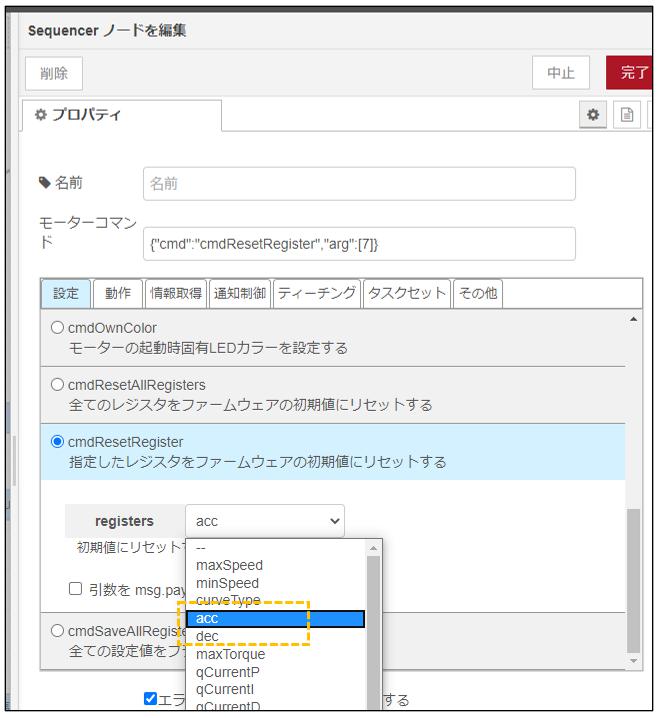
リセットする際は cmdResetRegister または cmdResetAllRegisters で指定します。
cmdResetRegister :設定項目の一部をリセットする cmdResetAllRegisters :設定項目すべてをリセットする
加速度・減速度はリセットすることで初期値10に戻ります。
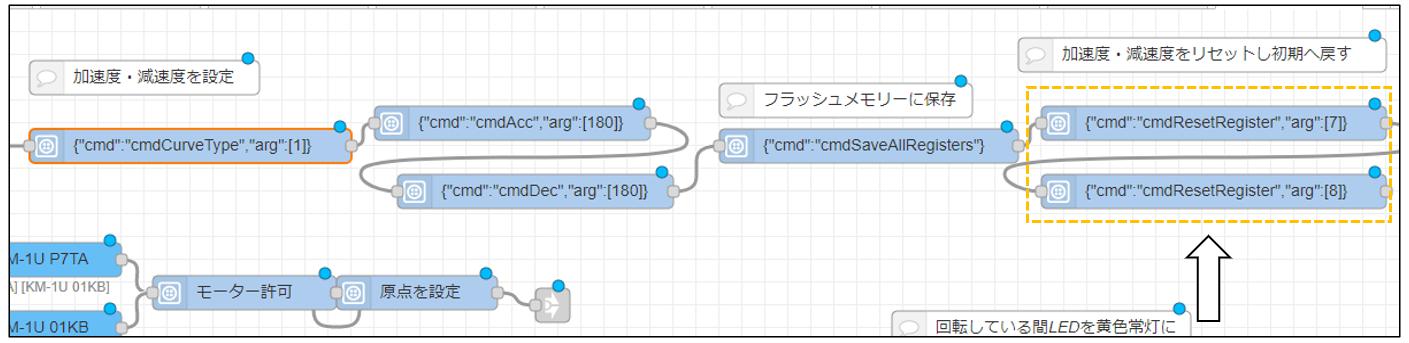
今回は機能確認として、前項で設定した加速度・減速度を cmdResetRegister でリセットするよう設定してください。
※以下図の通り、acc,decをそれぞれ別のノードで設定
実際にKeiganMotorを動かす
実際にKeiganMotorを動かし、指定した通りの動作をするか確認します。
cmdResetRegister で加速度・減速度をリセットしている場合は設定値10で加速・減速(右図)し、リセットしていない場合は設定値180で加速・減速(左図)します。
使用事例
冒頭でいくつかご紹介した通り、加速度・減速度は求められる機能・作りたいロボットに合わせて調整が必要です。
KeiganPiを使用すれば素早く簡単に思い通りの速度変更に変更できますので、目的に合わせ自由に調整ください。
今回使用したノード
今回のブログで使用した ノード は以下から読み込みが可能です。
文字列を全て選択(3回クリック)し[ctrl]+[c]でコピーしてください。
ノードの読込み方法は【こちら】
次回予告
次回はKeiganMotorの生産用治具をKeiganPiで動かして効率化を図ります。
次回も是非ご覧ください。

※KeiganPiとは、Raspberry Pi(ラズパイ)にKeiganMotorの開発環境をインストールした製品です。
