←【Node-RED入門-12】撮影した画像を日付時刻ごとに保存する
→【Node-RED入門-14】動作とカメラの撮影を指定回数繰り返す
■全記事一覧→Node-REDまとめ
もくじ
今回の内容

今回はカメラプラットフォームキットにUSBスピーカーを接続し、KeiganPiのSDカード内に保存したサウンドを再生します。
サウンドは周辺の人が装置を見ていなくても情報を伝えることができ、注意喚起や警告を発せるため多くのメリットがあります。
1.オーディオ出力を設定する 2.再生用サウンドを設定する 3.PlaySoundノードを設定する 4.実際にKeiganMotorを動かす
オーディオ出力を設定する
今回使用するカメラ及び周辺機器について
今回は以下のスピーカーを使用します。
KeiganPiのUSB端子に空きがない場合は、USBハブも別途ご用意ください。


出力先を設定する
まずはターミナルを起動し、オーディオの出力先を設定します。
リモートデスクトップ接続でKeiganPiを操作し、以下の順番で設定を行ってください。
※リモートデスクトップ接続の方法は【こちら】
※ターミナルの起動方法等は【こちら】
sudo raspi-config と入力しEnterキーを押す。
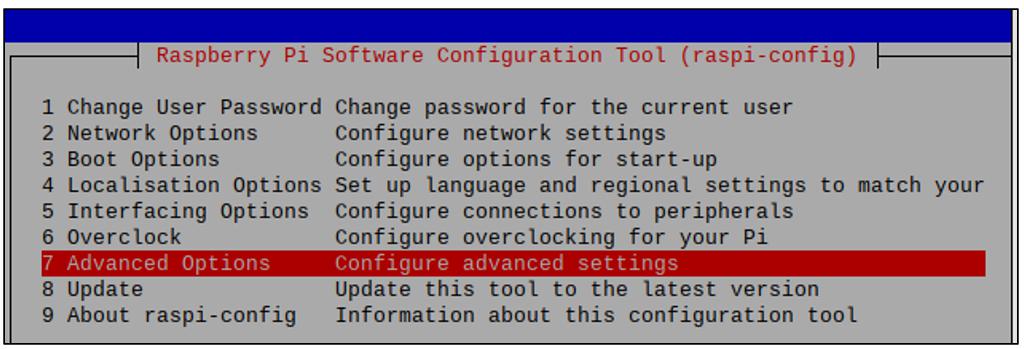
7 Advanced Options を選択しEnterキーを押す。
Audio を選択しEnterキーを押す。
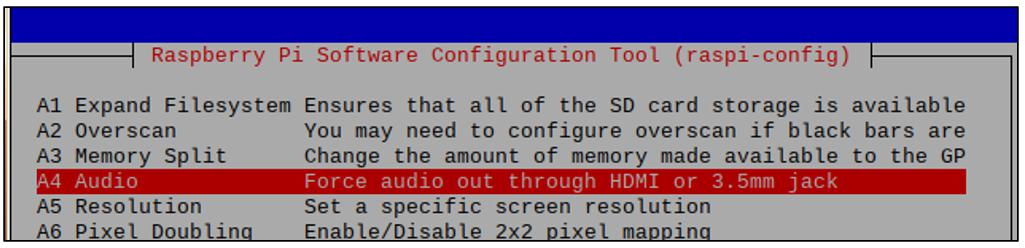
1 Force 3.5mm('headphone') jackを選択しEnterキーを押す。

以上でジャックに接続したスピーカーからオーディオを出力できるようになりました。
再生用サウンドを設定する
次に、スピーカーから再生するためのサウンドを用意します。
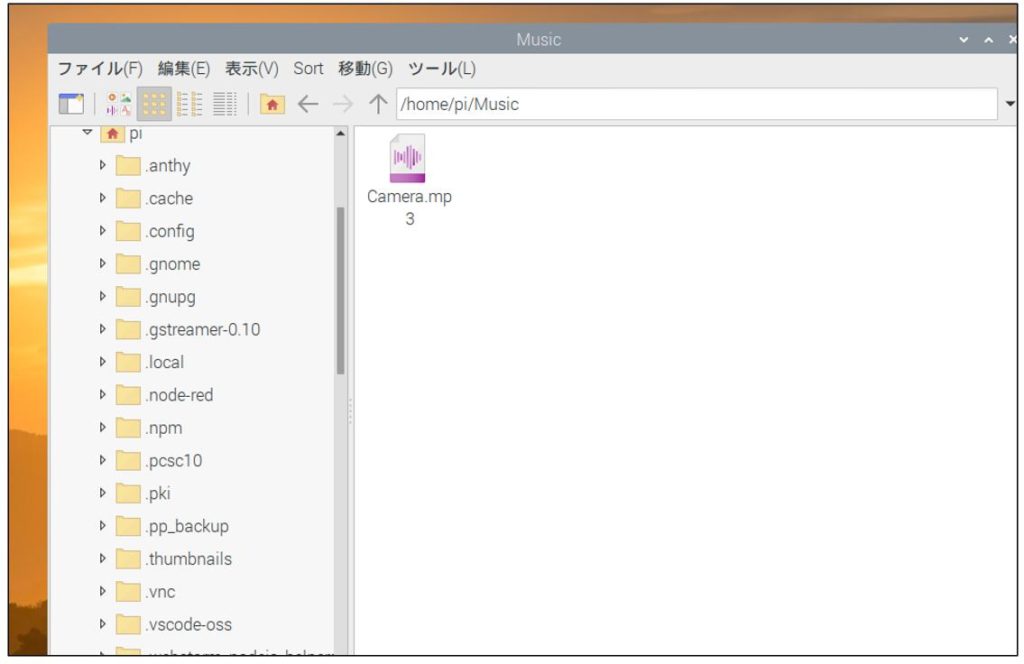
好みのmp3ファイルの名前を「Camera.mp3」に変更し、KeiganPiの以下フォルダに保存してください。
/home/pi/Music/Camera.mp3
リモートデスクトップ接続をしている場合、PCにあるファイルを[ctrl]+[c]でコピーし、KeiganPiへ[ctrl]+[v]で貼付けすることもできます。
PlaySoundノードを設定する

パレット にあるPlaySoundノードを配置します。
ノード が無い場合は過去ブログを参照し、 ノードを追加 から「node-red-contrib-play-sound」を追加してください。
PlaySoundノードの設定
PlaySoundノード は 入力ポート から情報を受け取るとオーディオデバイス(USBスピーカー)から指定したサウンドを再生します。
ノード のプロパティを開き、以下の通り設定してください。

Player options :{}
Audio URI :/home/pi/Music/Camera.mp3
Audio Options :{}
この設定によりCamera.mp3がスピーカーから再生されるようになりました。
撮影のフローを作成する
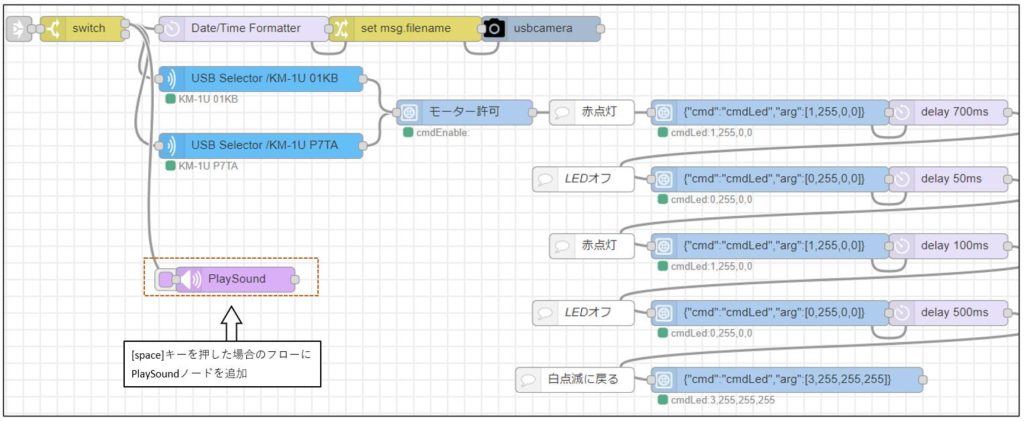
前回のブログを参考にキーボードの[space]キーを押した時に PlaySoundノード が実行されるようフローを配置してください。
※前回のフローは【こちら】から読み込んでください。
実際にKeiganMotorを動かす
実際にKeiganMotorを動かし、カメラ撮影と同時にサウンドが再生されることを確認してください。
※再生されない場合、USBスピーカー本体のボリュームツマミがミュートになっていないか確認してください
使用事例
injectノード と組み合わせることで目覚まし時計として利用したり、センサーと組み合わせて警報装置にすることも可能です。
過去ブログの事例と組み合わせ、様々なアイデアをお試しください。
今回使用したノード
今回のブログで使用した ノード は以下から読み込みが可能です。
文字列を全て選択(3回クリック)し[ctrl]+[c]でコピーしてください。
ノードの読込み方法は【こちら】
次回予告
次回は写真撮影に回数を設定し、一定数の写真を撮影すればフローが終了する設定を行います。
次回も是非ご覧ください。
→【Node-RED入門-14】動作とカメラの撮影を指定回数繰り返す

※KeiganPiとは、Raspberry Pi(ラズパイ)にKeiganMotorの開発環境をインストールした製品です。
