今回は佐賀大学佐藤和也研究室の山城佑太様によるKeiganMotor KM-1Sの使用事例として、スマートフォン利用支援用ロボットアーム装置をご紹介します。
山城さんは、学生ビジネスプランコンテスト「キャンパスベンチャーグランプリ」の全国大会で経済産業大臣賞を受賞されている起業家でもあります。
(参考リンク:座圧軽減装具 フワット(株式会社山城機巧))
もくじ
装置の概要
本装置は、腕を自由に動かせない方のスマートフォン操作をサポートするため開発されました。例えば、電話着信時に耳元までスマートフォンを移動することができます。
佐藤和也先生の研究室では、本装置のコンセプトを「操作支援装置」として特許化されています。(特許6086440号)
以前、佐藤和也先生の研究室では、青崎 史哉さん と 藤瀬 想太郎さんが、 RCサーボ(ラジコンサーボ)モーターを使用したスマートフォン利用援用ロボットアーム(以下、旧装置)を制作されており、様々な工夫により利用者に使いやすい形として開発されていました。
今回の装置では、新たな要求仕様として、個人のライフスタイルに合わせて、ロボットアームの動きが柔軟な変更できることが求められていました。
山城さんは KeiganMotor KM-1S を3個使用し、ダイレクトティーチングの機能を用いて、本課題を解決されています。
装置の機能
スマートフォンの状況をアプリで管理し、以下3種類の状態によってアプリからモーターに指示を出してロボットアームを動かし、スマートフォンを目的の位置まで移動させます。(旧装置、今回の装置共通)
- 【着信時】ボタンを押しやすい位置に移動
- 【通話時】耳元に移動
- 【通話終了時】最初の位置へ移動
旧装置と本装置の比較
以下にRCサーボモーターを用いた旧装置と、KeiganMotorを使用した今回の装置の違いをご紹介します。


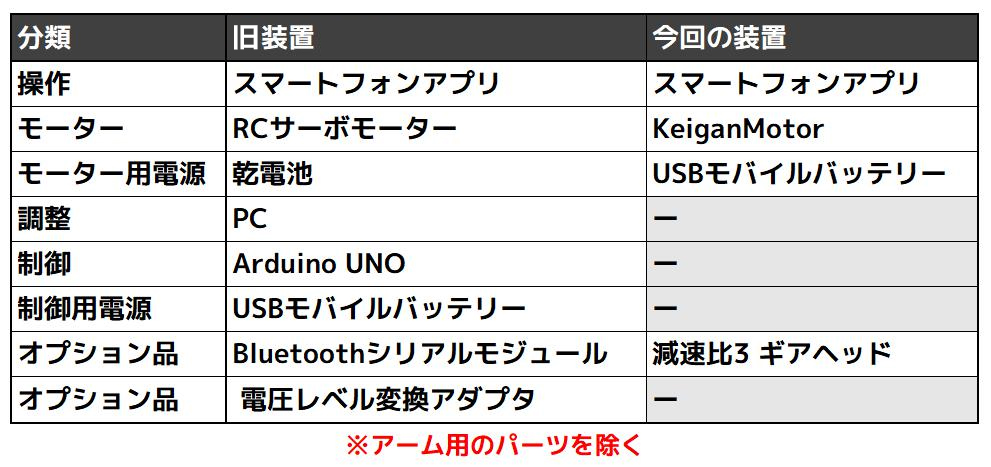
Arduinoをはじめとして、旧装置で必要だったハードウェア部品の多くの機能をKeiganMotor単体で達成できており、更に、旧装置であった以下の課題も解決できました。
旧装置の課題
旧装置では、ハードウェアが多いため、開発前に様々な互換性の検証が必要でした。また、開発後も、専門知識やPCが無ければメンテナンスやロボットアームの動作を変更することができませんでした。
それらの課題もKeiganMotorを使用することで解決できました。
KeiganMotor による解決

開発前の課題
- シリアルモジュール・サーボモーター・制御装置との互換性の検証が必要だった。
→KeiganMotorに全て内蔵されており、機器間の通信など、検証の手間がなくなった。
開発後の課題
- プログラムを修正するためには、PCとプログラミングの知識が必要だった。
- 一人一人の環境に合わせるため、細かな修正が必要だった。
使用頂いた KeiganMotor の機能スマホのアプリで簡単に修正でき、ダイレクトティーチング機能(以下にて解説)により細かな修正がその場で可能になった。
以下に、ダイレクトティーチング機能についてご紹介します。
ダイレクトティーチング機能
KeiganMotor には、直接ロボットを手で動かして動きを記録させる「ダイレクトティーチング」と呼ばれる機能が備わっており、今回の装置で使用されています。

旧装置では、動作を事前にプログラミングコードで設定し、ロボットに書き込まれていました。いわゆる、「オフラインティーチング」と呼ばれる方法です。
KeiganMotorによるダイレクトティーチング
スマホアプリ「KeiganPlay」からティーチングモードに入り、ロボットアームを実際に手で動かして記録します。使用者にとって最適な動きとなるように、位置を調整するだけで設定が完了します。
(3つのKeiganMotorをダイレクトティーチングで同時に設定)
設定後は、山城さんが作成されたアプリが、スマートフォンの状況によってKeiganMotorを動かします。作成されたアプリからは、簡単なコマンドでティーチングで記録した動作を呼び出すことができます。
ダイレクトティーチングは、アプリケーションからは10種類まで記録できますので、組み合わせにより、複雑な動きを設定することも可能です。
ティーチングの詳細は、こちらの KeiganPlay 使用方法 をご参照下さい。
今回使用頂いたKeiganMotorについて
今回使用いただいた『KeiganMotor KM-1S』は目的や用途に応じて選択できる3種類のラインナップが存在します。

KM-1S-M4021 (小)
KeiganMotor モーターモジュール®
モーター直径:Φ40mm
モーター重量:69g
KM-1Sシリーズで最も小型の製品。
トルクをそれほど必要としない場合や、設置スペースに制限がある場合に最適です。
値段もリーズナブルで人気の商品です。

KM-1S-M4625 (中)
KeiganMotor モーターモジュール®
モーター直径:Φ46mm
モーター重量:91g
KM-1Uに最も近い性能の中型モーターの製品です。
KM-1Uで検証済かつ設置スペースの制限がある場合は本製品を推奨します。

KM-1S-M6829 (大)
KeiganMotor モーターモジュール®
モーター直径:Φ69mm
モーター重量:195g
KM-1Sシリーズで最も大きい大型モーターの製品です。
KM-1Uよりも高トルクが必要な場合にオススメです。
KeiganMotorには他にも多くの機能がありますので以下動画も是非ご覧ください。
