KeiganAGV10LU とは
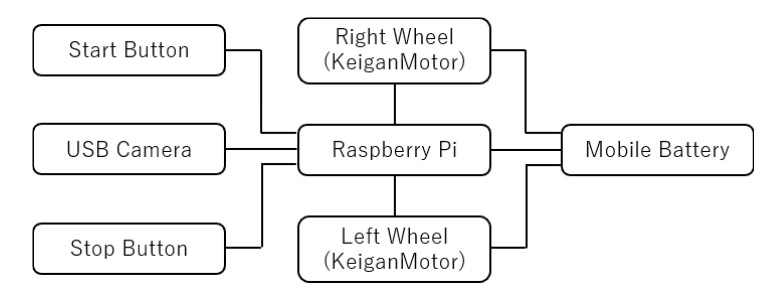
KeiganAGV10LUは、KeiganMotor、RaspberryPi、USBカメラを使用したライントレーサーAGVです。
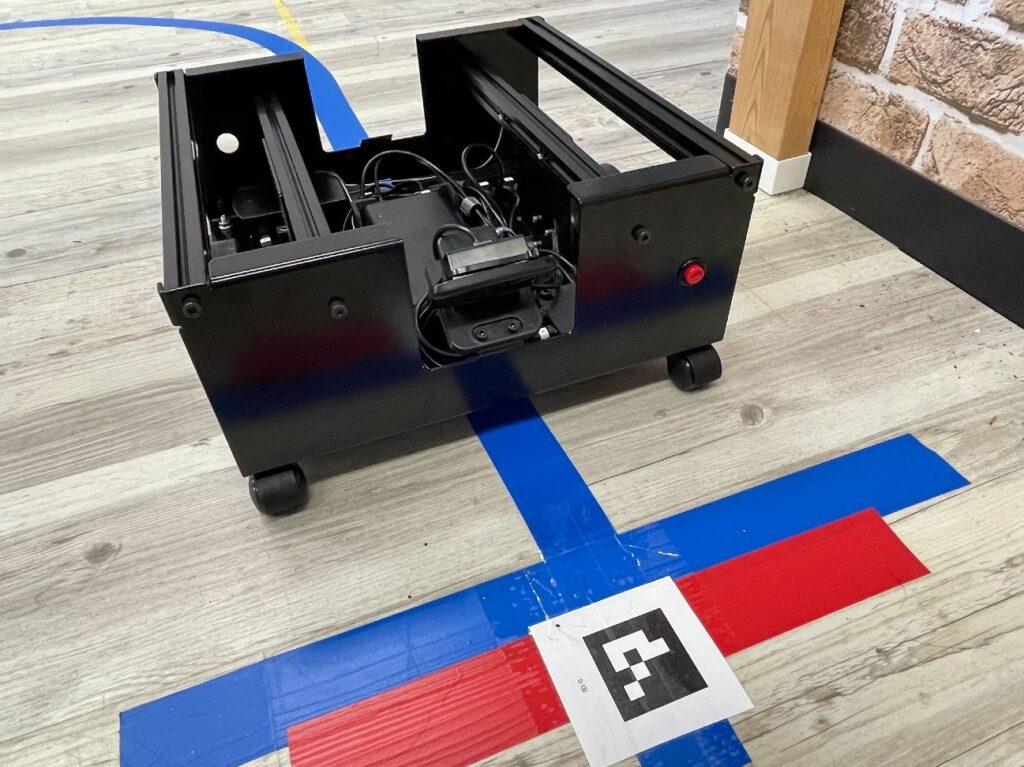
- 青色のテープをライントレース
- arucoマーカーや赤色のテープを検知し、停止などアクションを実行。
- KeiganMotor を追加することで、搬送物の積み下ろしが可能。
Pythonプログラミング言語によるオープンソースで開発頂けます。

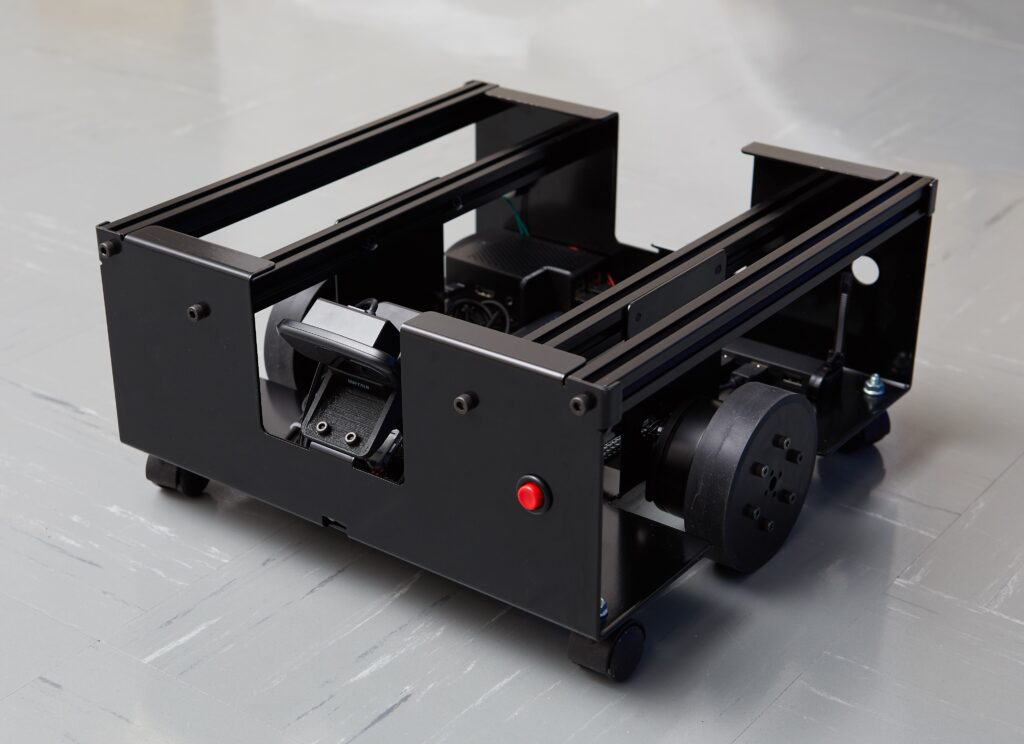
本体フレームには、走行開始や停止に使用できるボタンが2個あります。停止には、赤色または青色のラインテープだけでなく、arucoマーカーを用いることもできます。
KeiganAGV10LU の仕様
| 型番 | KeiganAGV10LU |
| 走行制御 | ラインテープ及びマーカーの画像認識 |
| メインコントローラ | Raspberry Pi 3B+, 3A+ または 4B |
| 車輪構成 | 駆動部モーター: KeiganMotor KM-1S-M6829TS 差動2輪方式(超信地旋回が可能) |
| タイヤ部直径 | φ101.6 mm |
| 最大回転数 | 140 rpm |
| 最⼤トルク | 0.5 Nm |
| 推奨搬送重量 | 10 kg |
| 推奨動作スピード | 12.7 m/分(0.2m/秒) |
| バッテリー | モバイルバッテリー (5V出力 容量20000mAh以上) |
| 動作時間 | 10 kg 牽引 または 積載搬送で 8時間以上 |
KeiganMotor、RaspberryPiともに5Vで駆動するため、電源はスマートフォン用のモバイルバッテリーを使用します。
主な構成部品
組み立て済みの状態で出荷します。
| 部品 | 数量 |
| 筐体フレーム(スイッチ x 2個 付き) | 1 |
| KeiganMotor KM-1S-M6829TS (ホイールタイヤ付) | 2 |
| キャスター | 4 |
| Raspberry Pi 3B+, 3A+ または 4B | 1 |
| SDカード 32GB | 1 |
| USB接続 Webカメラ | 1 |
| USBハブ | 1 |
| USB Type-A to micro B ケーブル(Raspberry Pi – KeiganMotor間) | 2 |
| USB Type-A to C ケーブル(KeiganMotor 給電用) | 2 |
| Raspberry Pi 用 USB給電ケーブル(Type-A to micro B または C) | 1 |
| モバイルバッテリー (5V出力 容量20000mAh以上) | 1 |
カスタマイズ
オープンソース・ソフトウェア
AGVキットは筐体を含むパッケージですが、オープンソースのコードとKeiganMotorを使用すると自分に合った形のAGVを作ることもできます。
https://github.com/keigan-motor/pykeigan_simple_agv
図面データ
図面データは、以下からダウンロード下さい。
また、メインコンピュータにRaspberryPiを使用しているためシステムを拡張することが可能です。
新製品の「KeiganMotor搬送ローラー」と組み合わせると、以下のように搬送物の積み降ろしなどの自動化システムを簡単に構築できます。
製品に関するお問合せやご購入に関しては以下よりお問合せください。
